
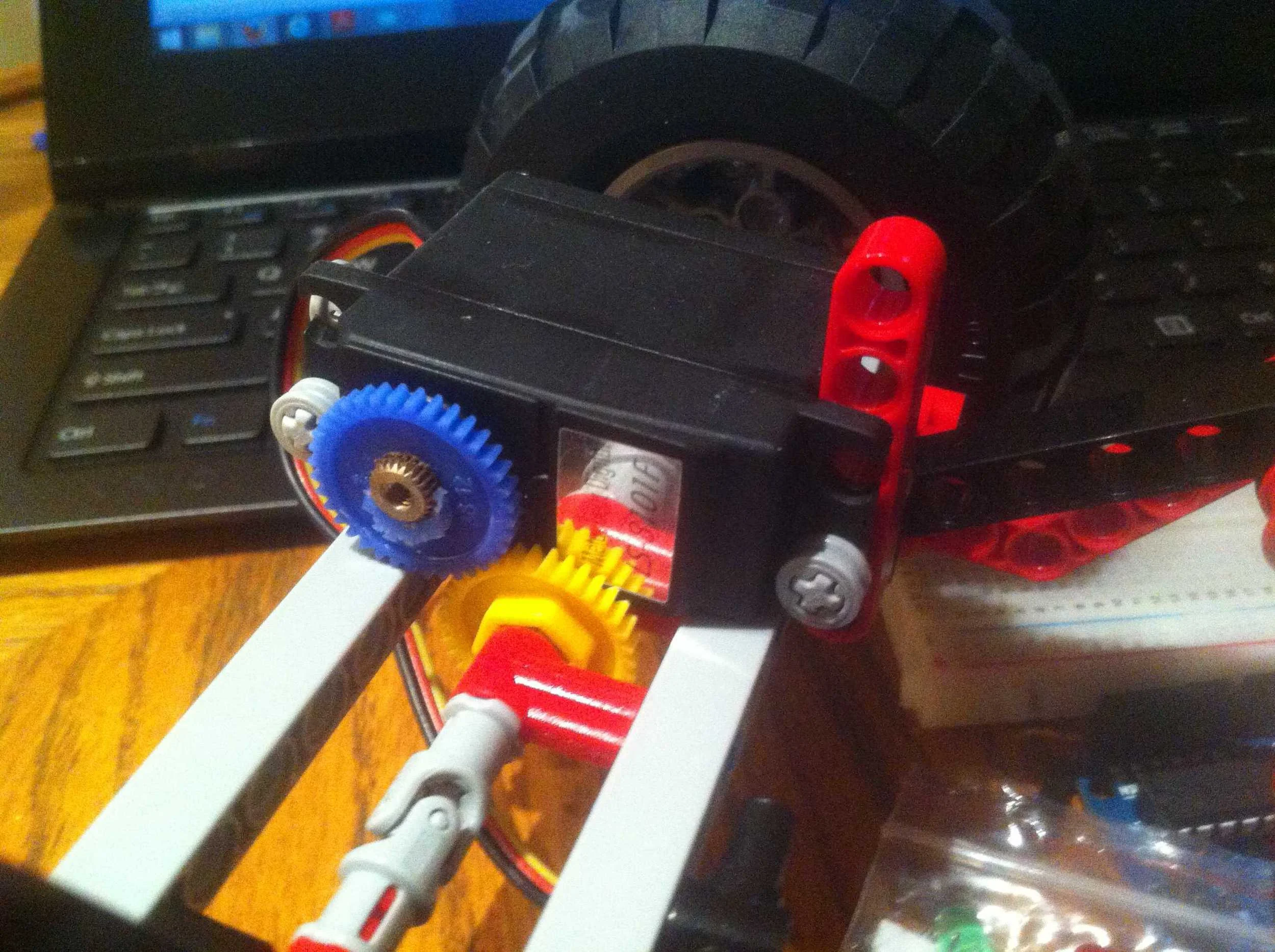
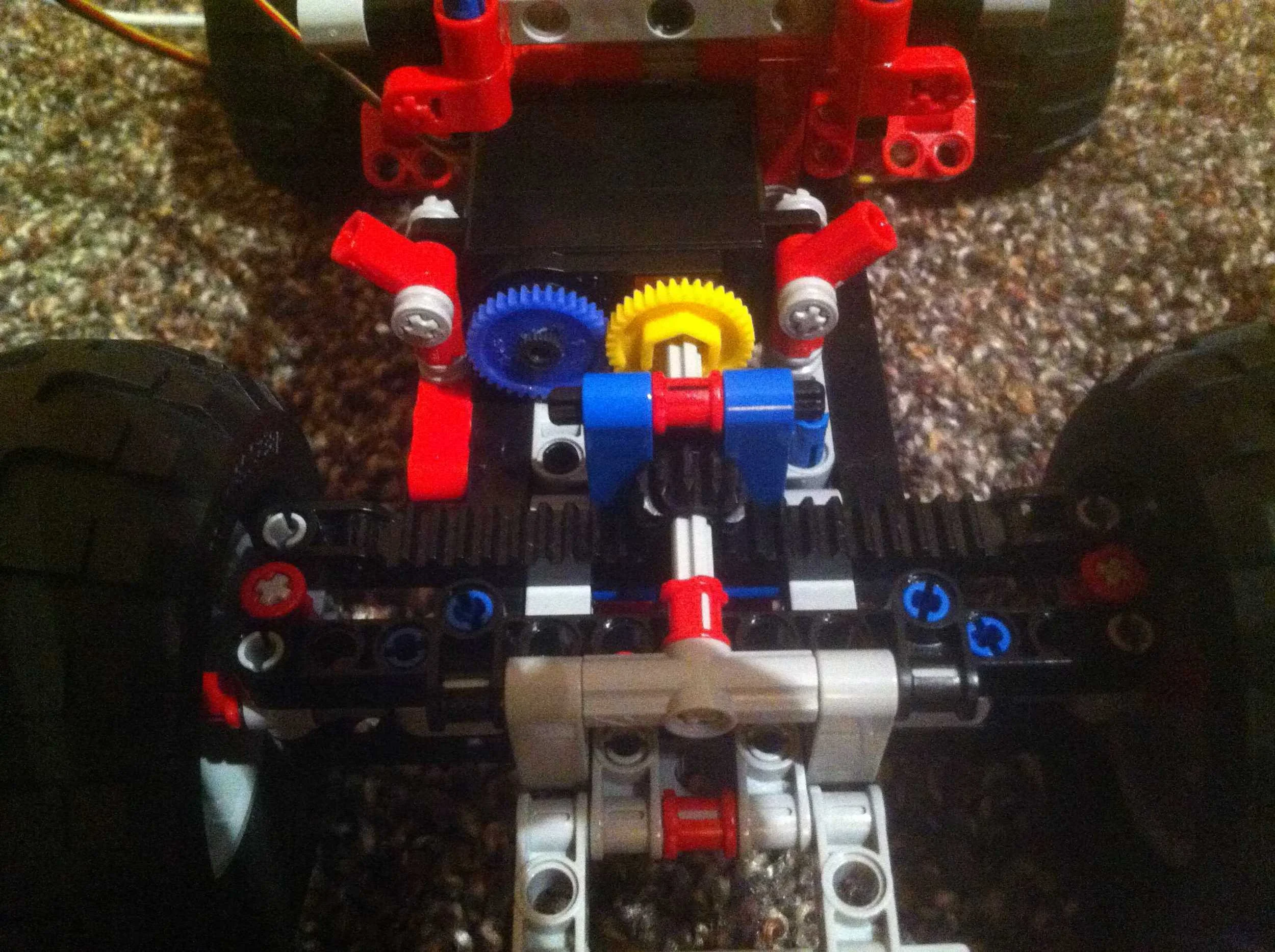
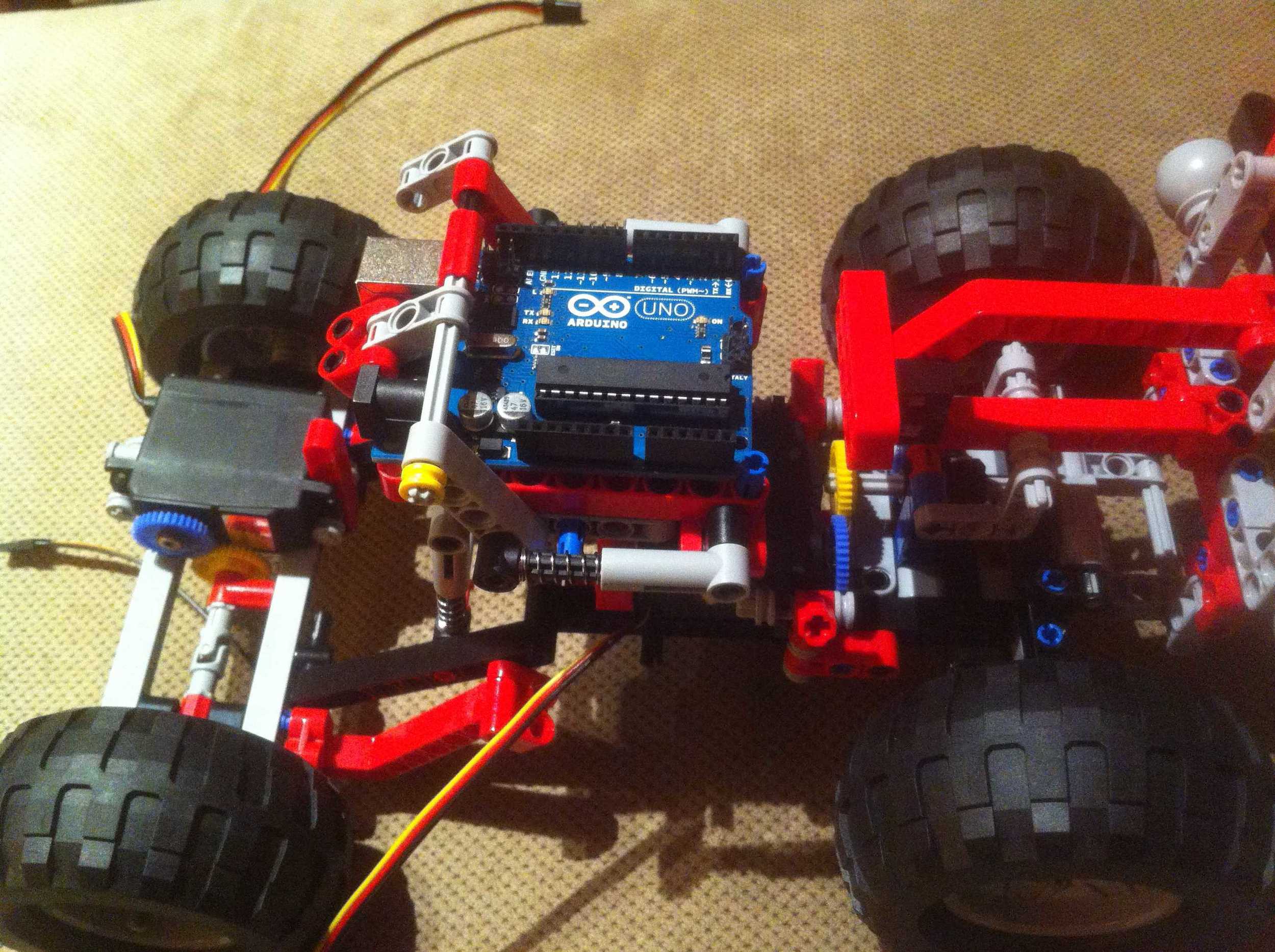
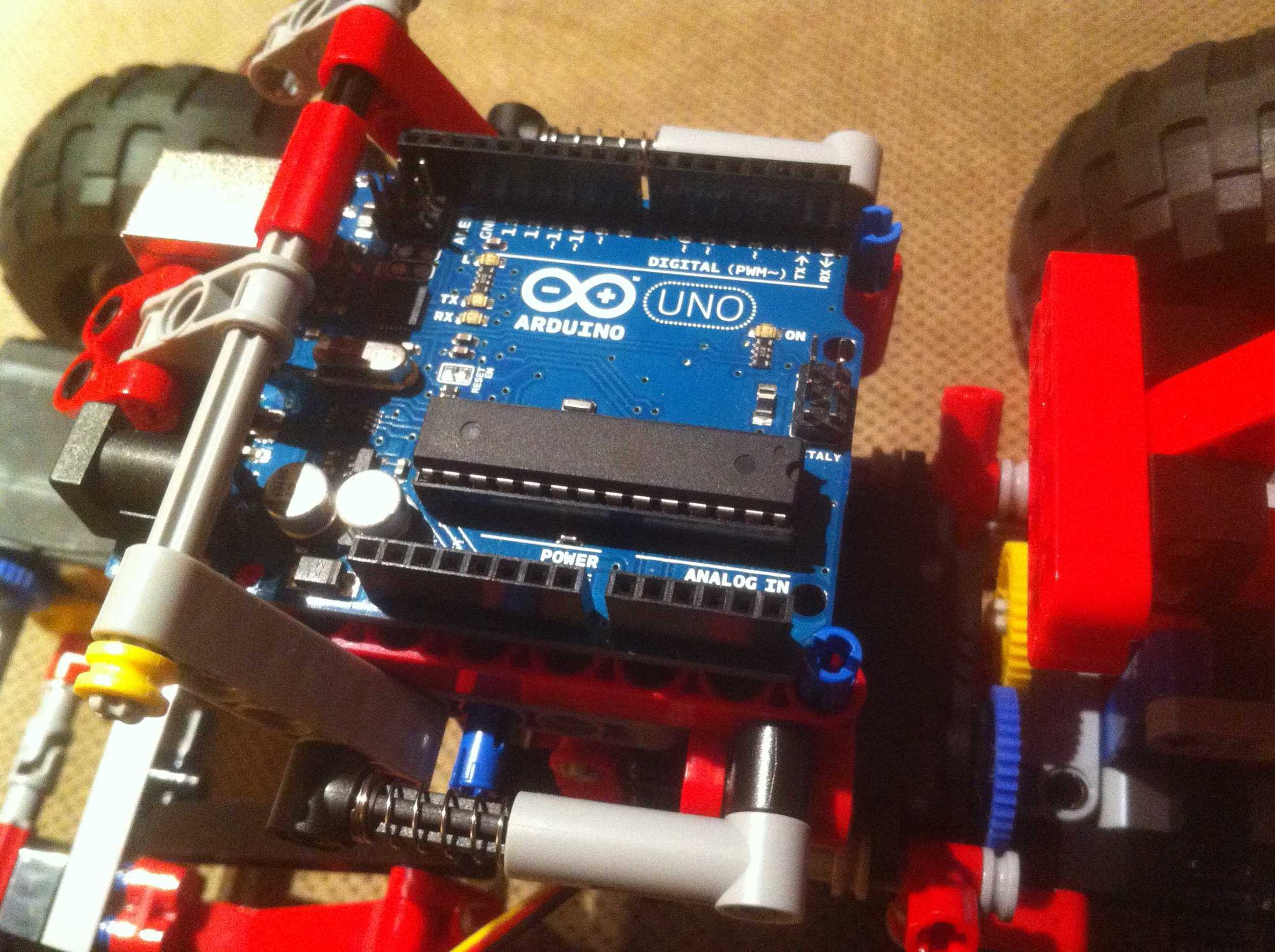
I built the Leguino so I could show the Control Theory class I was TA'ing how easy it is to write a simple PIcontroller in Arduino. We as a class wrote the code for a simple P and PI controller then we tested it out as a group. The controller input was a measurement from an ultra sound sensor, and the plant input was the server speed.




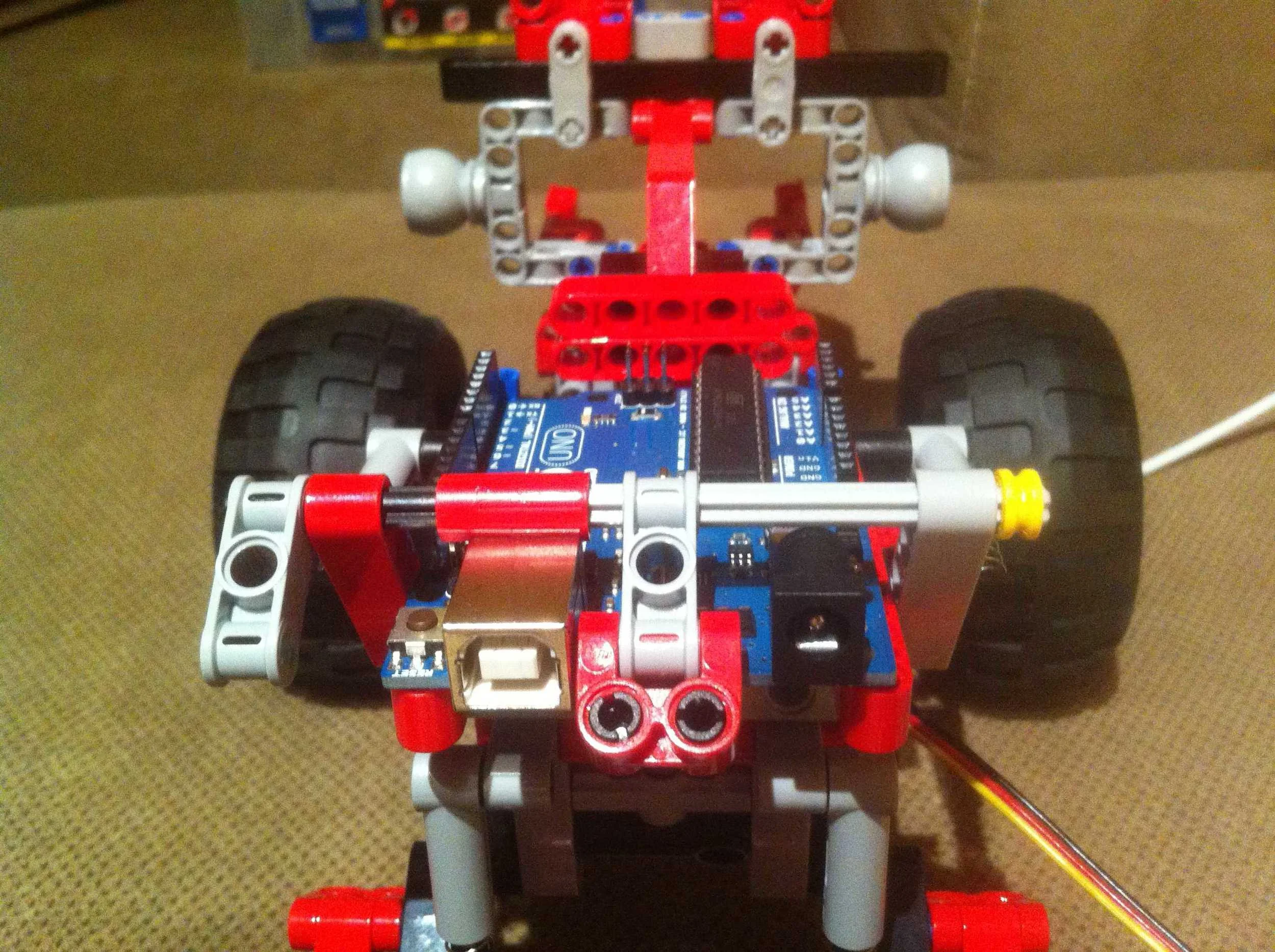




This video shows a pure P controller inaction and showcases the accuracy of the sensor.